背景
飞书日历一直以来有一个问题(其实有好多问题),例如不支持显示法定节假日,这样就会导致我在安排时间表的时候必须参考另外的日历——但飞书日历本身就是个日历,这样感觉很不优雅,直到我看到了这篇文章。但是它是采用的飞书内置的流程中心(需要付费),对于白嫖用户来说并不友好。幸运的是飞书官方支持日历的API,所以我和 Gemini 一拍即合,打算尝试一下能不能只使用 AI Vibe Coding 来完成这个功能,最后我和 Gemini 总共花了 1h42m 就完成了这个项目的开发和调试(其实主要还是调试比较麻烦,因为时区问题导致了很多bug,虽然我觉得我手工写可能用不了一个小时)。
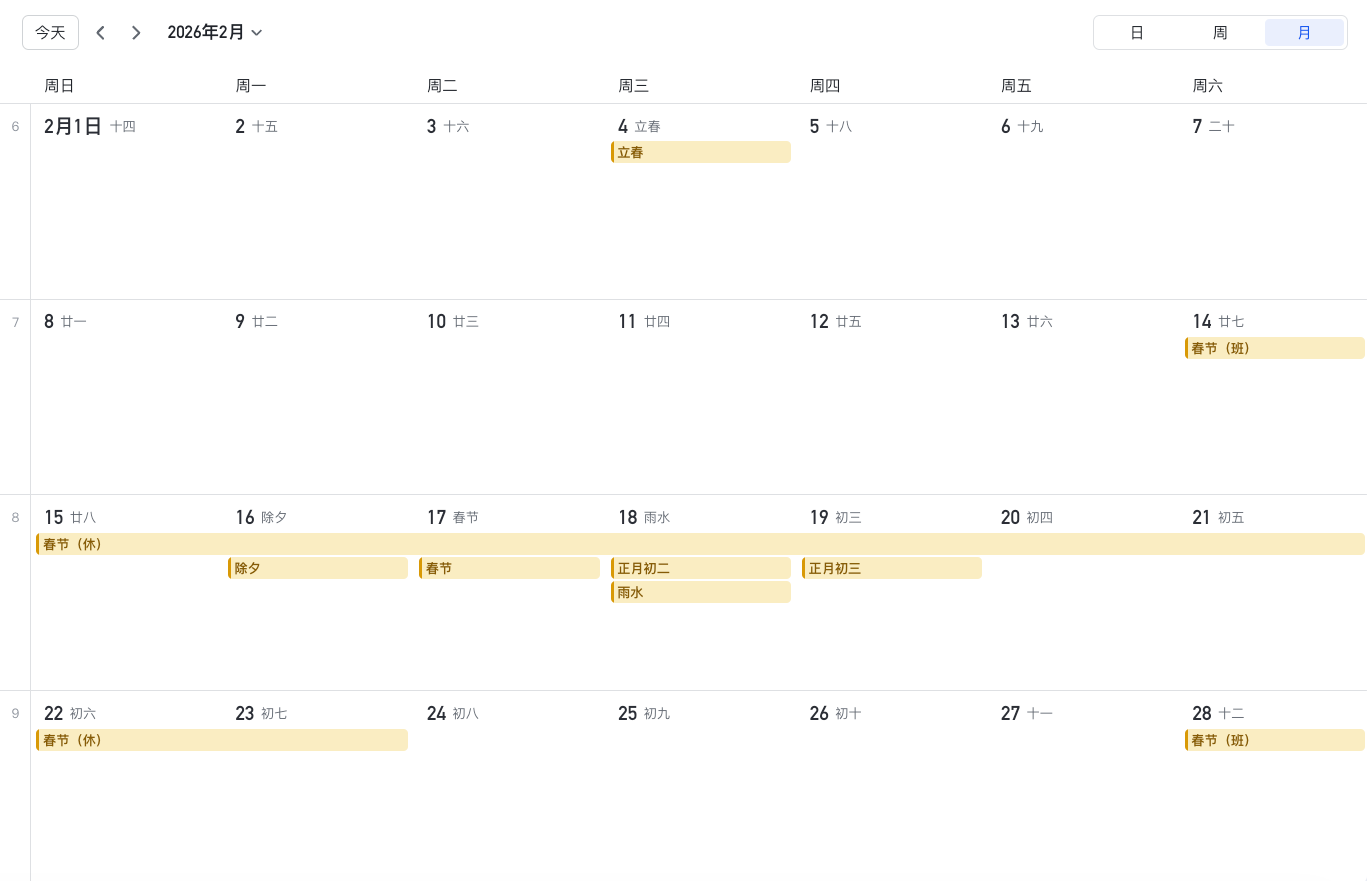
先附上效果图: